
搜索结果: 1-15 共查到“飞行器控制、导航技术 系统”相关记录584条 . 查询时间(1.609 秒)
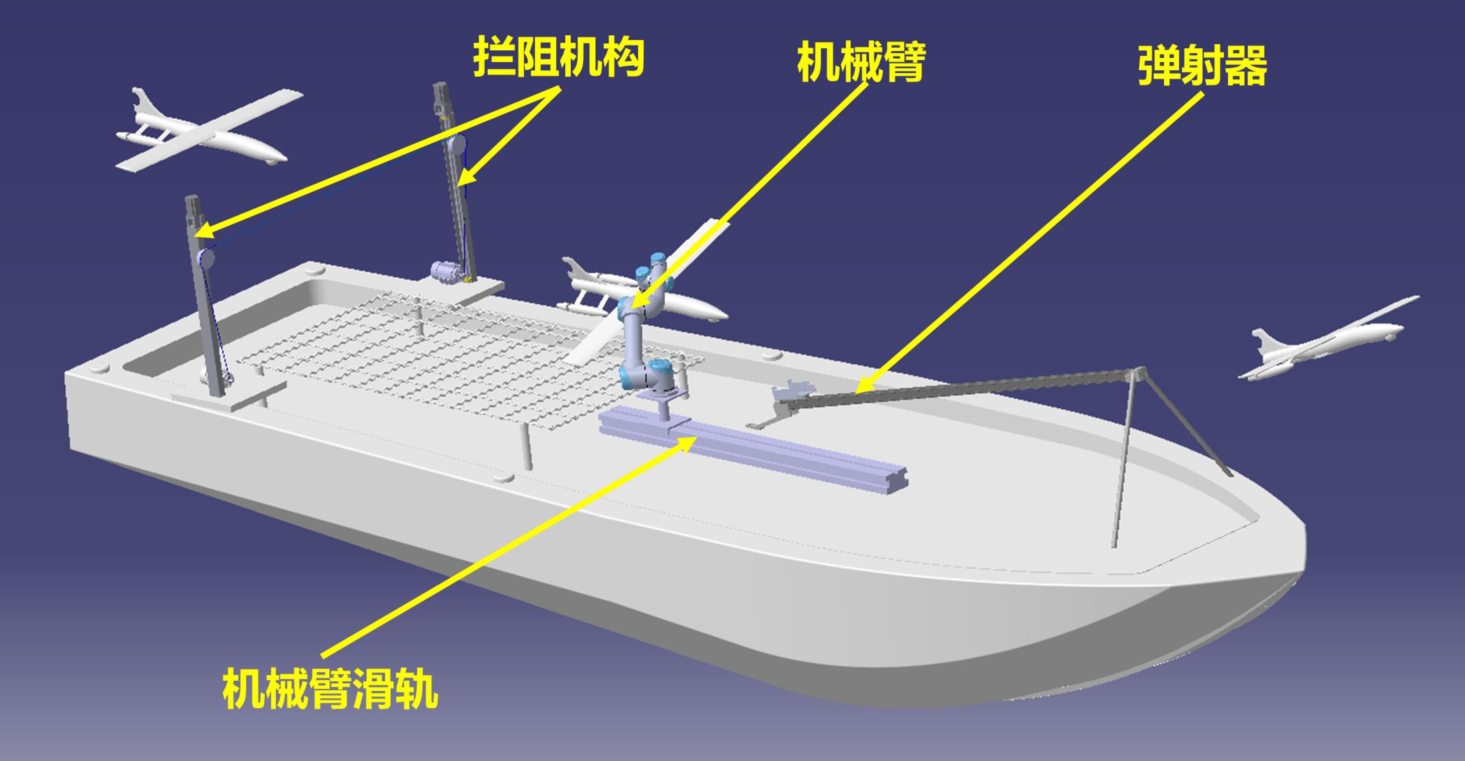
无人机自动化释放回收系统(图)
无人机 自动化 释放回收
2024/10/29
核心技术:掌握了无人机精准降落控制,主动柔性拦阻等核心技术。重点解决了无人机在小范围空间的短距起降问题。拥有无人机飞行控制器、柔性拦阻机构等方面的核心专利。成果体现形式:新装备。技术成熟度:形成技术方案。成果领先性:核心指标达到国际技术同等水平。
中国科学院地理科学与资源研究所专利:一种多无人机通过障碍物降落的方法及系统。

2023年农机畅销产品:辅助驾驶(系统)设备。北斗导航自动驾驶系统:第一名上海联适导航技术股份有限公司;第二名上海华测导航技术股份有限公司;第三名黑龙江惠达科技股份有限公司。农机作业智能监测终端:第一名江苏北斗卫星应用产业研究院有限公司;第二名湖南湘数大数据科技有限公司;第三名黑龙江惠达科技股份有限公司。
中国科学院深圳先进技术研究院专利:基于路径交流的导航系统及方法
中国科学院深圳先进技术研究院 专利 路径交流 导航系统
2023/11/11
中国科学院深圳先进技术研究院专利:基于路径交流的导航系统及方法
中国科学院深圳先进技术研究院专利:一种定位导航系统;装置及方法
中国科学院深圳先进技术研究院专利:基于定位二维码的城市导航系统的构建方法以及导航系统
针对交会对接多任务自主决策问题,介绍基于锚点的智能交会策略,以及多约束下的轨迹规划和控制问题。
基于扩张状态观测器的四旋翼吊挂飞行系统非线性控制
四旋翼飞行器 吊挂飞行 积分反步法 扩张状态观测器
2024/1/16
针对一类四旋翼飞行器吊挂飞行系统的负载摆动抑制和轨迹跟踪精确控制的问题,考虑系统存在未知外界扰动和模型动态不确定的情况,提出一种基于扩张状态观测器(Extended state observer,ESO)的吊挂负载摆动抑制的非线性轨迹跟踪控制方法.将四旋翼吊挂飞行系统分解为姿态、位置和负载摆动控制三个动态子系统,分别设计非线性控制器实现欠驱动约束下的解耦控制。
本申请公开了一种临近空间垂直投放发射定向飞行导航制导方法及系统,该方法包括:获取飞行器与浮空器分离时刻所述飞行器升力面法向以及目标航向;根据所述升力面法向与地理坐标位置关系确定所述飞行器升力面法向与所述目标航向之间的夹角;根据所述夹角生成滚转制导指令并发送至所述飞行器的滚转通道舵面。本申请提供的临近空间垂直投放发射定向飞行导航制导方法,引入初始定姿的飞行器升力面法向与地理坐标解算关系,确定垂直下落...
中国科学院声学研究所专利:一种四旋翼无人飞行器的状态受限控制方法和系统
“新型惯性仪表与导航系统技术”重点学科实验室
惯性仪表 导航系统 重点学科实验室
2024/1/11
“新型惯性仪表与导航系统技术”重点学科实验室2007年7月经国防科工局批准建立,于2013年7月5日通过现场评估验收。实验室拥有精干的教研队伍和强大的软硬件资源,现有固定人员52人,其中中国工程院院士2人,中国科学院院士1人,国家杰出青年科学基金获得者4人,长江学者特聘教授6人,973计划首席科学家2人,多人多次获得国家级奖励。
本申请公开了一种临近空间垂直投放发射点火阶段制导控制方法及系统,该方法包括:确定飞行器进入点火阶段后根据获取到的俯仰通道力矩指令以及第一参数集计算获得俯仰通道舵面控制指令;根据获取到的俯仰通道舵面控制指令、偏航通道力矩指令以及第二参数集计算获得偏航通道舵面控制指令;根据获取到的俯仰通道舵面控制指令、偏航通道舵面控制指令、滚转通道力矩指令以及第三参数集计算获得滚转通道舵面控制指令。本申请提供的临近空...
基于非线性干扰观测器的飞机全电刹车系统滑模控制设计
飞机防滑刹车系统 终端滑模控制 非线性干扰观测器 反馈线性化
2024/1/18
飞机防滑刹车具有典型的强非线性、强耦合和参数时变等特点,并且跑道环境的干扰容易对飞机的地面滑跑性能造成不利影响.本文提出了一种基于非线性干扰观测器的飞机全电防滑刹车系统滑模控制设计方法.首先,考虑了实际刹车不确定性干扰条件下的防滑刹车动力学建模问题,通过对高阶非线性刹车系统进行反馈线性化处理,简化了基于严格反馈的模型.其次,基于对主轮打滑原因的深入分析,设计了非线性干扰观测器对干扰进行在线估计,并...

哈尔滨工业大学交通科学与工程学院科研成果机场飞行导航监视管理系统。