
搜索结果: 1-15 共查到“知识库 飞行器控制、导航技术”相关记录3835条 . 查询时间(6.1 秒)
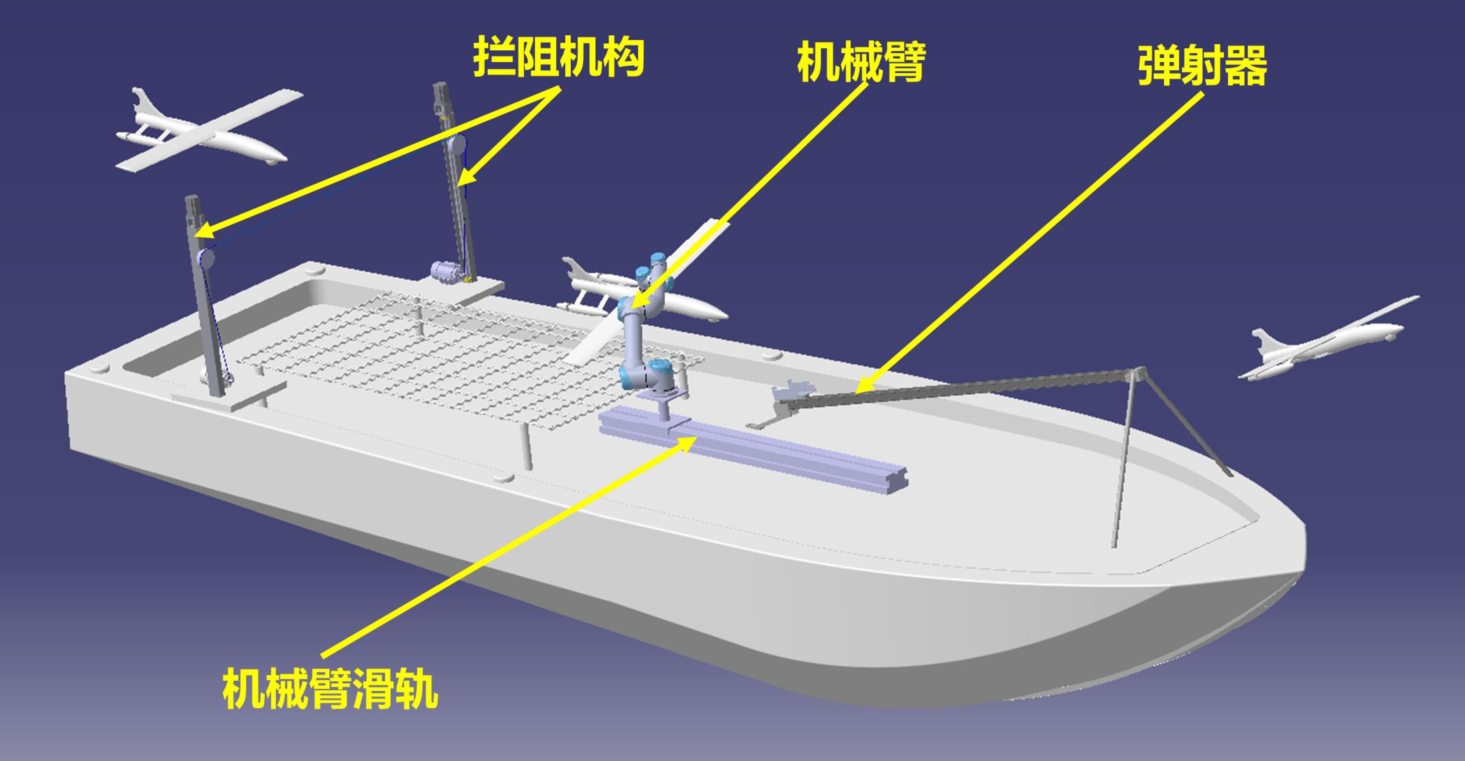
无人机自动化释放回收系统(图)
无人机 自动化 释放回收
2024/10/29
核心技术:掌握了无人机精准降落控制,主动柔性拦阻等核心技术。重点解决了无人机在小范围空间的短距起降问题。拥有无人机飞行控制器、柔性拦阻机构等方面的核心专利。成果体现形式:新装备。技术成熟度:形成技术方案。成果领先性:核心指标达到国际技术同等水平。

2023年农机畅销产品:辅助驾驶(系统)设备。北斗导航自动驾驶系统:第一名上海联适导航技术股份有限公司;第二名上海华测导航技术股份有限公司;第三名黑龙江惠达科技股份有限公司。农机作业智能监测终端:第一名江苏北斗卫星应用产业研究院有限公司;第二名湖南湘数大数据科技有限公司;第三名黑龙江惠达科技股份有限公司。
基于ACP理论的微型扑翼飞行器的姿态控制
微型扑翼飞行器 姿态控制 神经动力学 平行智能
2024/1/16
微型扑翼飞行器(Flapping wing micro aerial vehicle,FWMAV)因飞行效率高、质量轻、耗能低、机动性强等显著优点,在飞行器研究和应用中占据重要地位.目前,FWMAV姿态控制成为飞行器控制研究领域的研究热点.针对FWMAV姿态控制问题,基于平行智能理论框架提出了一种FWMAV抗扰动姿态控制器.通过建立人工系统(Artificial systems,A)、计算实验(C...
在多无人机(Multi-unmanned aerial vehicles,Multi-UAVs)协同执行高层消防救援任务的场景中,室内复杂火场环境下路径规划是亟待解决难题之一.针对快速搜索随机树算法(Rapidly-exploring random tree,RRT)搜索区域受限、耗时较长、结果可行性差等问题,提出RRT森林算法.通过随机选取根节点、生成随机树、连接合并随机树,使高层消防多无人机在...
基于定制内点法的多无人机协同轨迹规划
轨迹规划 多无人机 凸优化 内点法
2024/1/16
为提高多无人机(Unmanned aerial vehicles,UAV)协同轨迹规划(Cooperative trajectory planning,CTP)效率,在解耦序列凸优化(Sequential convex programming,SCP)方法基础上,提出一种高效求解凸优化子问题的定制内点法.首先引入松弛变量,构建子问题的等价描述形式,并推导该形式下的子问题最优性条件.然后在预测...
相关滤波算法(Correlation filter,CF)已广泛应用于无人机目标跟踪.然而,受无人机(Unmanned aerial vehicle,UAV)平台本身计算性能的制约,现有的无人机相关滤波跟踪算法大都仅采用手工特征来描述目标的外观,难以获得目标的全面语义信息.并且这些跟踪算法仅能较好地进行光照条件良好场景下的跟踪,而在跟踪夜间场景下的目标时性能严重下降。
基于自适应多尺度超螺旋算法的无人机集群姿态同步控制
奇异摄动 超螺旋算法 多尺度 姿态协同'四旋翼无人机
2024/1/16
四旋翼无人机(Unmanned aerial vehicle,UAV)系统姿态角和角速度分别为运行在不同时间尺度上的慢、快动态.由于输入扰动的上界难以精确估计,本文提出一种基于自适应多尺度超螺旋(Super-twisting,STW)滑模算法的无人机集群一致性控制策略.首先,建立无人机集群系统的姿态角模型,并通过奇异摄动理论将其化为两时间尺度形式.基于系统的快慢特性,本文设计两时间尺度的超螺旋滑模...
基于扩张状态观测器的四旋翼吊挂飞行系统非线性控制
四旋翼飞行器 吊挂飞行 积分反步法 扩张状态观测器
2024/1/16
针对一类四旋翼飞行器吊挂飞行系统的负载摆动抑制和轨迹跟踪精确控制的问题,考虑系统存在未知外界扰动和模型动态不确定的情况,提出一种基于扩张状态观测器(Extended state observer,ESO)的吊挂负载摆动抑制的非线性轨迹跟踪控制方法.将四旋翼吊挂飞行系统分解为姿态、位置和负载摆动控制三个动态子系统,分别设计非线性控制器实现欠驱动约束下的解耦控制。
面向省级电网管理业务的统一时钟平台建设(图)
管理业务 统一时钟 北斗导航系统
2023/5/22
统一可靠准确的时间是电网企业安全生产和高效运营的必要条件。本文构建统一时钟平台,实现时钟源的统一监测、统一预警,为省级电网管理业务提供统一、安全、准确的时钟源,有效解决时钟服务缺乏安全防护、时钟源缺乏在线管理、授时不规范等问题。
当前,轨道空间日益拥挤、太空竞争不断加剧,对航天器执行既定任务时的轨道威胁自主应对能力提出了新的挑战,使得航天器智能自主控制技术迎来新的发展机遇.在调研分析了轨道威胁感知、自主决策规划、规避机动动作执行、自主控制系统架构相关研究进展的基础上,总结提出了威胁规避智能自主控制面临的主要瓶颈问题,并分析指出发展“感知−决策−执行”一体化控制是破解瓶颈难题的有效手段,最后从一体化控...
无人机反应式扰动流体路径规划
无人机 反应式路径规划 受约束扰动流体动态系统 深度强化学习 训练环境
2024/1/17
针对复杂三维障碍环境,提出一种基于深度强化学习的无人机(Unmanned aerial vehicles,UAV)反应式扰动流体路径规划架构.该架构以一种受约束扰动流体动态系统算法作为路径规划的基本方法,根据无人机与各障碍的相对状态以及障碍物类型,通过经深度确定性策略梯度算法训练得到的动作网络在线生成对应障碍的反应系数和方向系数,继而可计算相应的总和扰动矩阵并以此修正无人机的飞行路径,实现反应式避...
基于KnCMPSO算法的异构无人机协同多任务分配
无人机多任务分配 多目标优化 粒子群算法 协同进化
2024/1/17
随着无人机(Unmanned aerial vehicle,UAV)技术的广泛应用和执行任务的日益复杂,无人机多机协同控制面临着新的挑战.以无人机总飞行距离和任务完成时间为优化目标,同时考虑异构无人机类型、任务执行时序等多种实际约束,构建基于多种约束条件的异构无人机协同多任务分配模型.该模型不仅包含混合变量,同时还存在多个复杂的约束条件,因此,传统的多目标优化算法并不能有效地处理混合变量及对问题空...
基本概况:先进导航技术研究所依托属“精密仪器及机械”、“导航、制导与控制”两个二级学科,其中“精密仪器及机械”为江苏省重点学科和江苏省国家重点学科培育点,“导航、制导与控制”于2017年入选国防科工局国防特色学科。
基于非线性干扰观测器的飞机全电刹车系统滑模控制设计
飞机防滑刹车系统 终端滑模控制 非线性干扰观测器 反馈线性化
2024/1/18
飞机防滑刹车具有典型的强非线性、强耦合和参数时变等特点,并且跑道环境的干扰容易对飞机的地面滑跑性能造成不利影响.本文提出了一种基于非线性干扰观测器的飞机全电防滑刹车系统滑模控制设计方法.首先,考虑了实际刹车不确定性干扰条件下的防滑刹车动力学建模问题,通过对高阶非线性刹车系统进行反馈线性化处理,简化了基于严格反馈的模型.其次,基于对主轮打滑原因的深入分析,设计了非线性干扰观测器对干扰进行在线估计,并...

哈尔滨工业大学交通科学与工程学院科研成果机场飞行导航监视管理系统。