
搜索结果: 1-15 共查到“知识要闻 控制科学与技术”相关记录1971条 . 查询时间(2.359 秒)
中国科学院沈阳自动化所牵头项目获评5G+医疗健康应用试点全国优秀项目
机器人 诊断 应用
2025/3/4
2025年3月3日,国家工业和信息化部与国家卫生健康委公布了《5G+医疗健康应用试点全国优秀项目及通过验收项目名单》。中国科学院沈阳自动化研究所牵头的“5G远程消化诊断机器人的研究与应用”项目顺利通过验收,并从全国987家参评项目中脱颖而出,荣获全国优秀项目称号。

中国科学院沈阳自动化所域泛化研究取得新进展(图)
网络 数据 机器人
2025/3/4
域泛化(Domain generalization)是从一个或多个源域中学习,其目标是提取一个可以在未知目标域中使用的域不变模型。在网络训练过程中,模型可能会过度依赖于训练数据集的分布,最终导致无法准确捕获未见数据中存在的适当模式。

胜利油田打造无人机智能巡检示范区(图)
胜利油田 无人机 智能巡检
2025/1/14
日前,胜利油田在纯梁采油厂、孤岛采油厂、现河采油厂、滨南采油厂、东胜公司打造5个无人机智能巡检示范区,探索构建“视频网巡+空中飞巡+人工精巡”的智能巡检新模式,确保油区生产安全。

2024年12月20日-12月22日,2024-2025全国VEX机器人精英赛暨VEX世锦赛中国选拔赛在上海交通大学闵行校区学生创新中心举办,作为新赛季第一场大型赛事,大学组吸引了来自西安交通大学、上海交通大学、同济大学、华中科技大学、哈尔滨工业大学(深圳)、重庆大学、东南大学、杭州电子科技大学等17所高校的29支队伍参赛。

中国科学技术大学提出基于对数螺旋线结构的新型螺旋软体机器人(图)
对数螺旋线 螺旋 软体机器人
2025/1/6
中国科学技术大学Nikolaos Freris特任教授课题组及其合作者魏熹特任副研究员在软体机器人领域取得重要进展。该团队基于对自然界中多种生物柔性肢体(如象鼻、章鱼触手、海马和变色龙尾巴)形态和运动的系统观察和数学模型抽象,首次提出基于对数螺旋线结构的新型螺旋软体机器人,展示了其在多维度和多场景中执行复杂抓取和操作任务的能力。相关研究成果以“SpiRobs: Logarithmic Spiral...
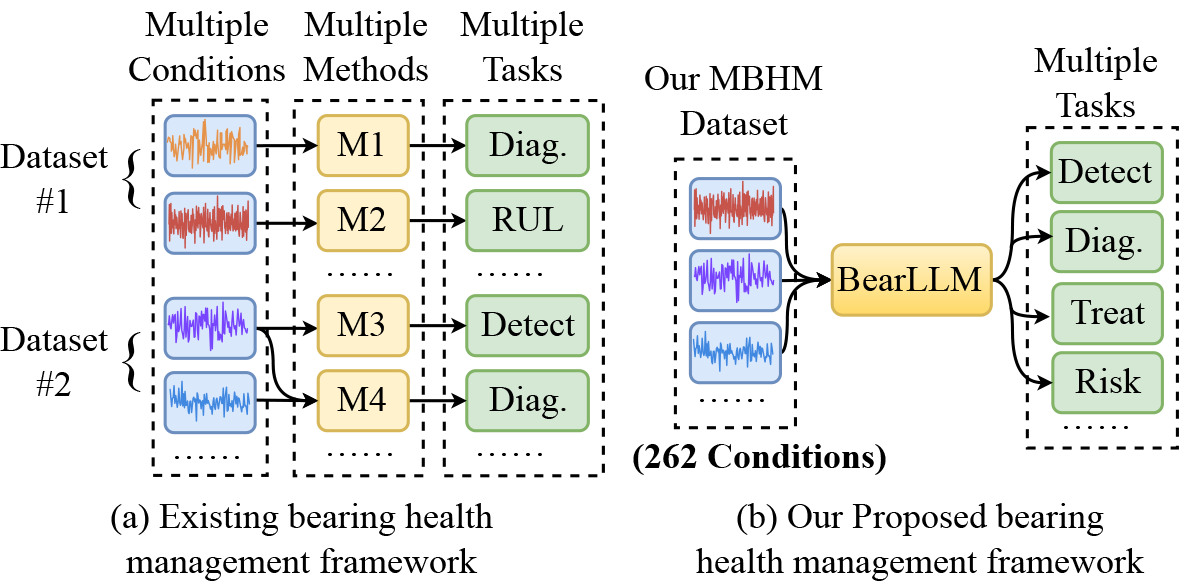
中国科学院沈阳自动化所在工业大模型健康管理应用领域取得新进展(图)
模型 健康 管理 应用
2024/12/20
工业设备因长期在高负荷环境下运行,容易发生各类故障,从而严重影响生产效率。设备健康管理对提升工业安全、减少经济损失和维护成本具有重要意义。然而,现有的健康管理方法多局限于有限的工况条件,并且通常只能执行单一的健康管理任务,难以满足复杂工业场景的需求。
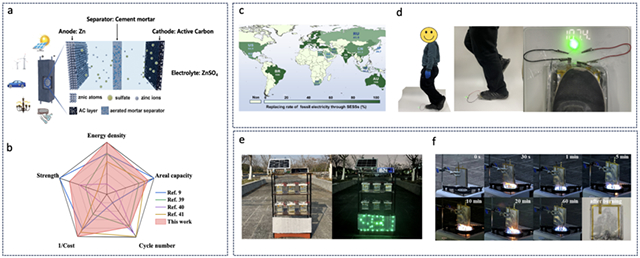
国家自然科学基金委员会中国学者在混凝土结构-储能一体化研究中取得进展(图)
结构 一体化 电池 资源
2024/12/21
在国家自然科学基金项目(批准号:52122802、52078126)等资助下,东南大学缪昌文院士与冯攀教授团队在混凝土结构-储能一体化研究中取得进展,相关研究成果以“锌阳极与水泥的结合:开拓可规模化的能量存储新路径(Integration of zinc anode and cement: unlocking scalable energy storage)”为题,于2024年9月4日发表在《国家...

南化公司3台智能焊接机器人上岗(图)
中国石化 焊接 机器人
2024/12/6
2024年11月11日,南化公司3台智能焊接机器人同时上岗,完成了公司苯化工部精馏塔再沸器管束两端的焊接。经检测,4800个管头的焊缝外观达到产品要求。

中国科学院上海天文台与合作伙伴利用人工智能高效仿真小行星表面温度与雅科夫斯基效应(图)
人工智能 仿真 行星
2024/11/24
2024年11月18日,南京大学天文与空间科学学院(赵舜景,雷汉伦)与中国科学院上海天文台(史弦)合作取得了基于人工智能技术的小行星表面温度建模方面的重要进展。相关研究成果以“Deep operator neural network applied to efficient computation of asteroid surface temperature and the Yarkovsky ...

近日,机器人技术与系统全国重点实验室刘英想教授团队在压电机器人操控器研究方面取得新进展,成功研制出一种用于血管精准穿刺的新型压电机器人操控器。相关研究以《一种面向生物体精细穿刺的二维跨尺度压电机器人操控器》(A Compact 2-DOF Cross-Scale Piezoelectric Robotic Manipulator with Adjustable Force for Biologic...

金属组学(metallomics)是系统研究生命体内所有金属/类金属元素含量、形态、分布、结构与功能的一门新兴学科。X射线荧光光谱技术(XRF)是一种优异的多元素、微损测定技术,无需对样品进行前处理即可开展多元素定性和定量分析,是金属组学研究最有力的工具之一。传统的XRF谱图采样通常需要几秒甚者十几秒,北京同步辐射装置(BSRF)X射线荧光微分析实验站(4W1B)基于高通量粉光50微米聚焦模式发展...

上海科技大学硬线项目启动直线加速器标准模组及波荡器隧道安装(图)
加速器 电子 激光 装置
2024/12/9
2024年11月8日上午11:26,随着首台1.3GHz超导加速标准模组在吊车的索引下缓缓升起,上海硬X射线自由电子激光装置(SHINE)超导加速标准模组及波荡器隧道安装工作正式启动。10分钟后,首台FEL-II波荡器顺利起吊。直线加速器标准模组以及波荡器隧道安装的顺利启动,是SHINE工程继注入器实现100MeV束流加速后的又一重要里程碑,标志着工程建设进入了一个全新的阶段。

中国科学院强流重离子加速器装置常温前端成功出束(图)
重离子加速器 装置 系统
2024/11/1
2024年10月26日,国家重大科技基础设施强流重离子加速器装置(HIAF)项目建设取得进展。HIAF常温前端成功调试出束,能量和流强达到设计指标,标志着HIAF项目从加速器装置装配阶段逐步迈入系统级联调阶段。

中国科学院沈阳自动化所移动介入急救机器人研究取得新进展(图)
机器人 结构 影像
2024/11/8
2024年10月31日,中国科学院沈阳自动化研究所机器人学研究室刘浩研究员科研团队与中国人民解放军北部战区总医院韩雅玲院士团队在车载多自由度急救机器人方面取得新进展。相关成果以Analytical Inverse Kinematics for a Prismatic-Revolute Hybrid Joints Radiography Robot Mounted on the Ambulance为...
